Летающие роботы размером с насекомых обычно предназначены для имитации биологических насекомых, потому что биологические насекомые считаются мастерами эффективного мелкого полета. Эти летающие микроаппараты с машущим крылом (FMAV) приближаются по размерам к реальным насекомым, а демонстрация работы некоторых роботов размеров с пчел на самом деле удивляет: они могут взлетать, парить и даже погружаться в воду.
Впрочем, создать крошечного робота с машущими крыльями, которые может двигаться во всех степенях свободы, необходимых для управления, довольно сложно, требует сложных механических передач и сложного программного обеспечения.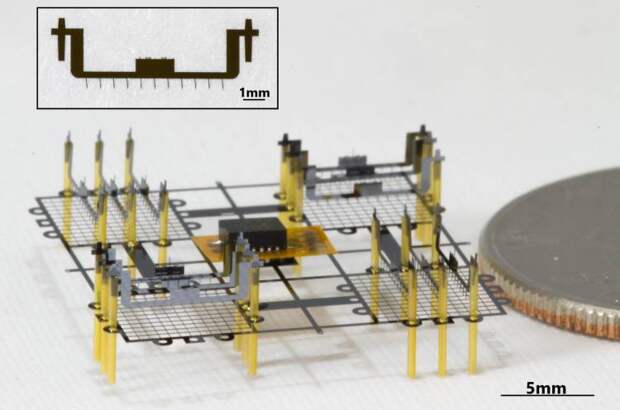
Нетрудно догадаться, почему биомиметический подход является предпочтительным: у насекомых было несколько сотен миллионов лет, чтобы проработать все движения, и другие способы, с помощью которых мы выяснили, как заставить роботов летать самостоятельно (а именно: системы на основе пропеллеров), масштабируются до малых размеров не очень хорошо. Но есть другой способ летать, и в отличие от крыльев или аэродинамических поверхностей, до такого животным не удалось додуматься: электрогидродинамическая тяга, которая не требует наличия движущихся частей, только электричества.
Маленький ионолет
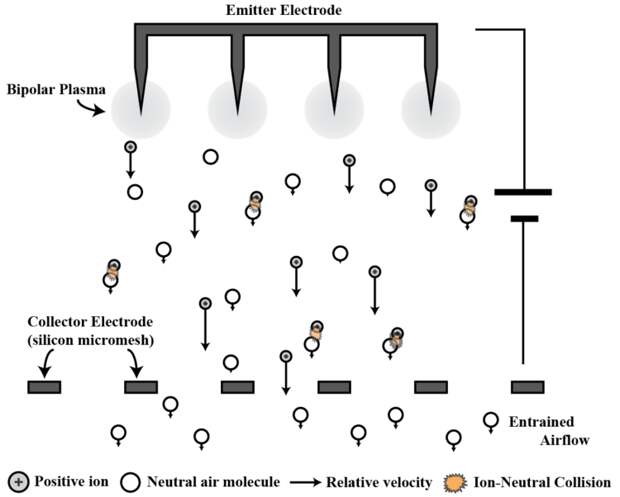
Электрогидродинамические (EHD) двигатели, которые иногда называются ионными двигателями, используют высокосильное электрическое поле для создания плазмы ионизированного воздуха. Ионы (в основном, положительно заряженные молекулы азота) притягиваются к отрицательно заряженной решетке и по пути попадают в нейтральные молекулы воздуха, придавая им импульс, из которого рождается ионная тяга.
Идея, по сути, не особо нова: общее явление известно уже несколько сотен лет, и какие-то время люди думали, что его можно использовать в пилотируемых самолетах. Впрочем, чтобы поднять человека, потребуется невероятно большая структура излучателей и коллекторных решеток.
В 2003 году на огромном ионном самолете полетала мышь Орвилл, но помимо симпатичных картинок мы не получили ничего. Технология не стала практичной.
Перед вами ионокрафт, который в настоящее время разрабатывается в Калифорнийском университете в Беркли. Он крошечный — всего 2 на 2 сантиметра, весит 30 мг и еще 37 мг — гидростабилизатор (хотя энергия подает по проводу). В небольших масштабах отсутствие движущихся частей становится серьезным преимуществом, потому что не нужно беспокоиться о том, как масштабировать механические элементы, такие как трансмиссии, ниже точки, когда они перестанут работать. С учетом груза гидростабилизатора ионокрафт мог взлетать и парить при входном сигнале 2000 вольт с напряжением чуть ниже 0,35 мА.
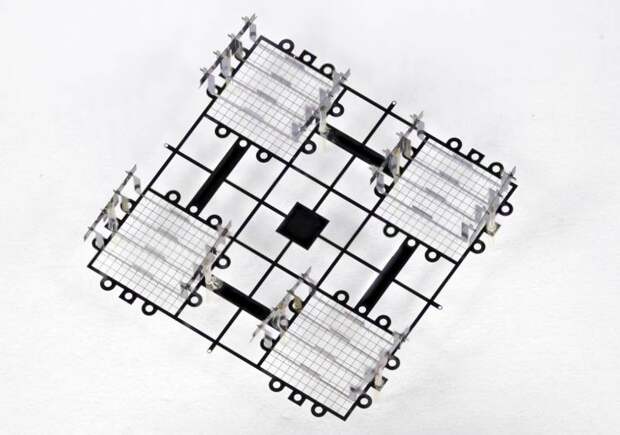
Магия, не так ли? Никаких движущихся частей, полная тишина и летающий аппарат. Более масштабные двигатели на EHD могут быть непрактичными, но уменьшение масштаба по сути делает их лучше, так как электростатические силы не зависят от масштаба. Это значит, что малые двигатели имеют лучшее соотношение тяги к весу, а также более низкие требования к напряжению. И в небольших масштабах преимущество ионокрафта перед FMAV аналогичных размеров в том, что можно разработать контроллер с квадротором в качестве отправной точки, поскольку ионокрафт использует четыре подруливающих решетки в аналогичной конфигурации Поскольку у него нет вращающихся пропеллеров, он не может воспользоваться преимуществами изменения углового момента для поворота, однако использует интересную схему рыскания, пока у него есть пространство для маневра.
Как и с другими летающими микроаппаратами, большим вопросом будет возможность автономной работы с полезной нагрузкой. На данный момент ионокрафт переносит полезную нагрузку больше своего веса, но ему нужно всего семь проводов для питания, данных и заземления. Ученые из Беркли считают автономию достижимой.
Свежие комментарии