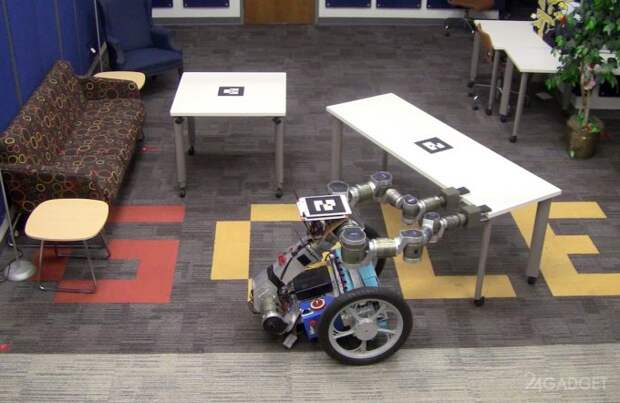
Современные системы навигации автономных роботов (не управляемых дистанционно) предписывают механизмам избегать препятствий на своем пути. В крайнем случае дроиды могут протаранить объект, проверив тем самым, поддастся ли тот силе удара. Если пройти в пункт назначения не удаётся, робот начинает хаотично двигаться в разные стороны, так и не достигнув цели. Но новая система навигации Navigation Among Movable Obstacle (NAMO) вкупе с алгоритмом Physics-Based Reinforcement Learning (PBRL) обещает добавить "извилин в мозг" роботам, как в примере со Страшилой из сказки "Волшебник Изумрудного города". В представленных роликах видно, как робот Golem Krang, оснащенный колесным ходом, манипуляторами, шестью камерами и новым алгоритмом, способен расчищать себе путь, устраняя помехи.
Разработчиками из Google DeepMind сообщается, что ни один из предметов помещения не был заранее записан в память робота. Он самостоятельно собирает, анализирует и систематизирует получаемые " на местности" данные, чтобы в дальнейшем использовать информацию для эффективного прохождения. Если с первого раза препятствующий проходу объект не удается эффективно сдвинуть с пути, Golem Krang останавливается, снова анализирует расположение предметов и свободное пространство, чтобы с новым планом действий приступить к выполнению своей задачи — пройти в пункт "Х".
Свежие комментарии