
Американские инженеры создали миниатюрного летающего робота массой 0,66 грамм, способного совершать продолжительный управляемый полет. Он оснащен четырьмя парами крыльев, приводимых в движение актуаторами, которые сокращаются под влиянием электрического поля, что и приводит крылья в движение. Статья о роботе опубликована в журнале Nature.
На протяжении последних лет разные группы инженеров разрабатывают микророботов, обычно имеющих массу менее грамма. На текущем уровне развития технологий это технически крайне сложная задача, потому что в устройстве такой массы и размера необходимо объединить двигательный механизм, плату управления, источник питания или систему приема энергии извне.
Для развития необходимых компонентов DARPA в прошлом году объявила отдельный конкурс среди инженеров.Если инженеры берутся за разработку летающего микроробота, то эта задача становится еще сложнее, потому что при этом возникает ограничение по массе, а также необходимость в более быстрых и легких актуаторах. Работающие прототипы робопчел массой в несколько сотен миллиграммов уже существуют, причем в последних разработках их возможности значительно выросли. Например, недавно две группы инженеров из Гарвардского и Вашингтонскогоуниверситетов представили летающих роботов на солнечных батареях, а также роботов (1,2), получающих энергию через провод, способных при этом совершать управляемый полет.
Во всех этих роботах используются пьезоэлектрические актуаторы, которые довольно удобны благодаря низким размеру и массе, но имеют ограниченную устойчивость к ударам. А она важна, учитывая, что пока такие роботы летают достаточно нестабильно. Теперь инженеры под руководством Роберта Вуда (Robert Wood) из Гарвардского университета показали робопчелу, в которой применяются мягкие диэлектрические актуаторы.
Инженеры создали базовый элемент, состоящий из одного цилиндрического актуатора и двух крыльев в торцах.
Они закреплены одновременно к актуатору и к раме, поэтому при сокращении актуатора крылья двигаются в одну сторону, а при расширении — в другую. Актуаторы состоят из диэлектрического эластомера, который меняет свою форму под действием электрического поля. Во время экспериментов актуатор работал при напряжении от 800 до 1400 вольт.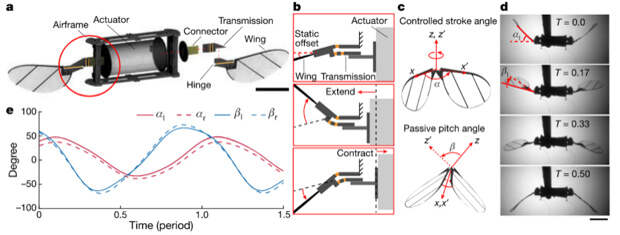 Схема базового элемента с актуатором и двумя крыльями, а также схема их работы
Схема базового элемента с актуатором и двумя крыльями, а также схема их работы
Из таких базовых элементов с двумя крыльями инженеры собрали несколько прототипов, у которых было от двух до восьми крыльев. Самый крупный из них имеет восемь крыльев и массу 660 миллиграмм. Главная его особенность заключается в том, что такое количество независимо управляемых элементов позволяет роботу поддерживать свое положение и поворачивать.
 Прототипы роботов, состоящие из разного количества модулей
Прототипы роботов, состоящие из разного количества модулей
Авторы экспериментально показали, что созданные ими робопчелы могут сталкиваться со стенами или другими роботами без повреждения крыльев и других элементов. Кроме того, они способны обнаружить столкновение на ранней стадии, отслеживая параметры работы актуатора.
Существуют впечатляющие проекты и шагающих микророботов. Например, в прошлом году Rolls-Royce представила проект микророботов для диагностики и ремонта авиадвигателей изнутри. А спустя полгода американские инженеры при поддержке компании показали работающий прототип микроробота, которому удалось пройтись в авиадвигателе в перевернутом положении благодаря ногам, прилипающим к поверхности с помощью электроадгезии.
Свежие комментарии