


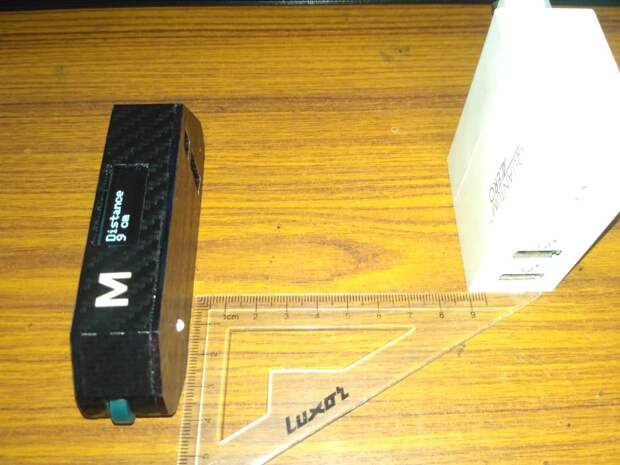




Мастер-самодельщик создал устройство, которое работает, как цифровой уровень + линейка + транспортир + рулетка. Устройство достаточно маленькое, чтобы поместиться в кармане, и его батарея легко заряжаются с помощью зарядного устройства для телефона.
Это устройство использует акселерометр и датчик гироскопа для точного измерения уровня и угла, ИК-датчик для бесконтактного измерения линейной длины от 4 до 30 см, датчик с колесом, которое можно катить по изогнутой поверхности или изогнутой линии для измерения длины объекта.
Навигация по режимам и функциям устройства осуществляется с помощью сенсорных кнопок, обозначенных как M (режим), U (единица измерения) и 0 (ноль).
M - выбор между различными типами измерений
U - для выбора между единицами измерения мм, см, дюймы и метр
0 - Сброс измеренных значений до 0 после измерения расстояния или угла.
Устройство имеет неодимовый магнит, встроенный в его основание, чтобы он не скользил и не соскальзывал с измеряемой металлической поверхности.
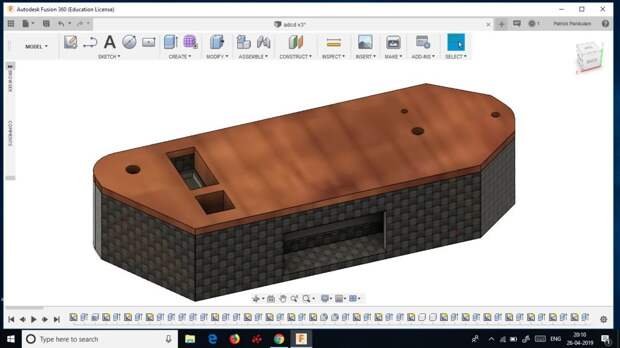
Корпус спроектирован так, чтобы сделать устройство максимально компактным.
Давайте посмотрим видео с примерами работы устройства.
Могут понадобиться
Цифровой вольтметр постоянного тока 2,5-40В
Штангенциркуль цифровой
Подключаем китайский цифровой вольтамперметр
Цифровой микроскоп для пайки Andonstar ADSM201
Универсальный низковольтный аудиоусилитель (УНЧ) LM386N
Инструменты и материалы:
-ИК датчик расстояния Sharp GP2Y0A41SK0F;
-Модуль MPU6050 акселерометр / гироскоп;
-Модуль заряда;
-Энкодер;
-128 X 32 OLED-дисплей;
-Arduino pro mini ATMEGA328 5 В / 16 МГц ;
-12 мм зуммер;
-3.7 В, 1000 мАч литий-полимерный аккумулятор;
- Модуль сенсорной кнопки TTP223 - 3 шт.;
-Неодимовый магнит 20x10x2 мм;
-Преобразователь интерфейса CP2102;
-Эмалированная медная проволока;
-Резисторы 10K - 2 шт;
-Стальной стержень длиной 19 мм диаметром 2 мм;
-Светодиод;
-Виниловая пленка;
- Кабель микро-USB;
-Ножницы;
-Нож;
-Пинцет;
-Клеевой пистолет;
-Супер-клей;
-Паяльные принадлежности;
-Лазерный резак;
- 3D-принтер;
-Кусачки;
-Наждачная бумага;



Шаг первый: корпус
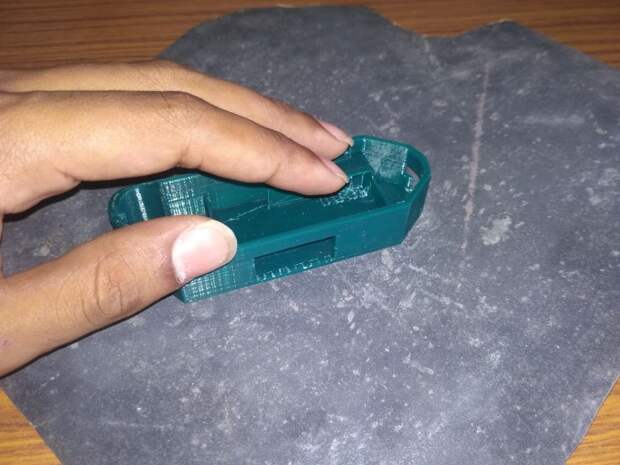
Сначала мастер, на 3D-принтере печатает корпус. Файлы для печати можно скачать ниже.
BODY.stl
LID.stl
wheel.stl

Оклеивает корпус виниловой пленкой, предварительно ошкурив его поверхность.











Шаг второй: схема
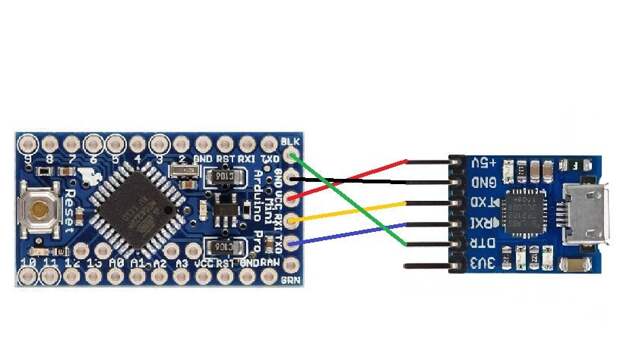
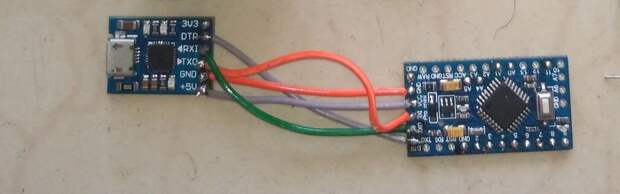
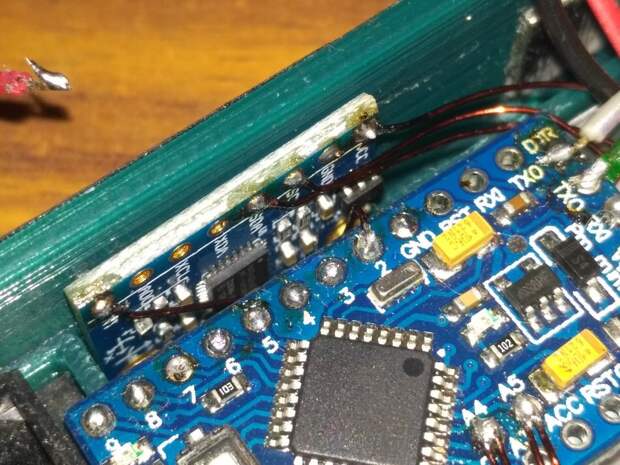
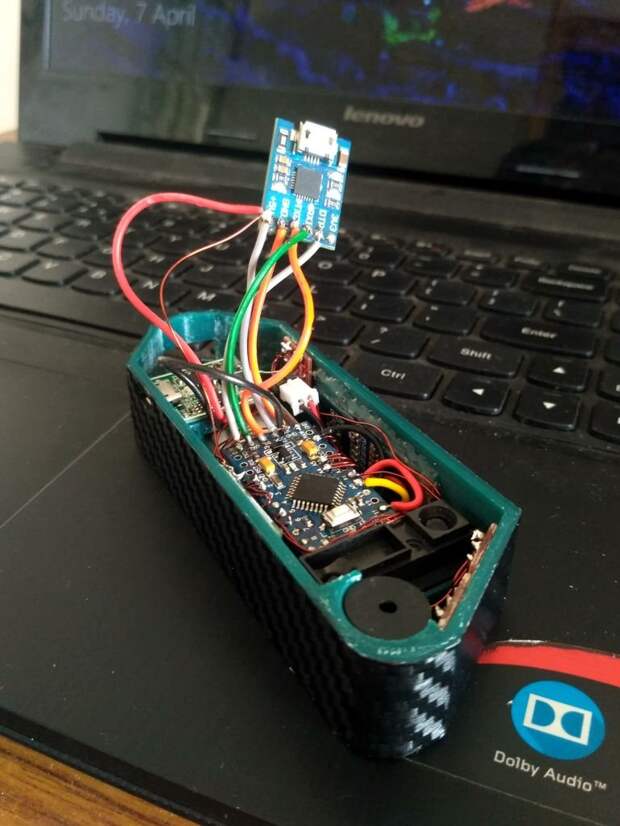
В отличие от Arduino nano, pro mini нельзя программировать напрямую, подключив USB-кабель. Поэтому сначала нужно подключить внешний USB к конвертеру pro mini, чтобы запрограммировать его. Первое фото показывает, как эти соединения должны быть сделаны.
Vcc - 5 В
GND - GND
RXI - TXD
TXD - RXI
DTR - DTR
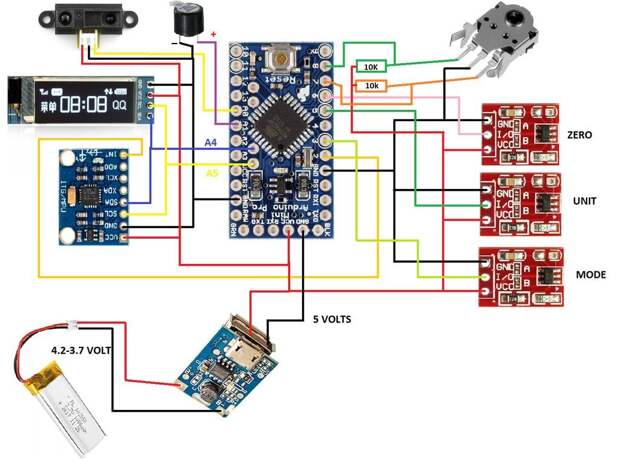
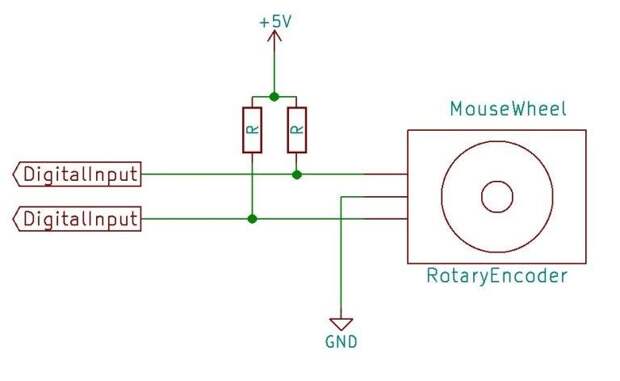
2-е изображение показывает полную принципиальную схему этого проекта.
Шаг третий: магнит
Приклеивает магнит к корпусу.



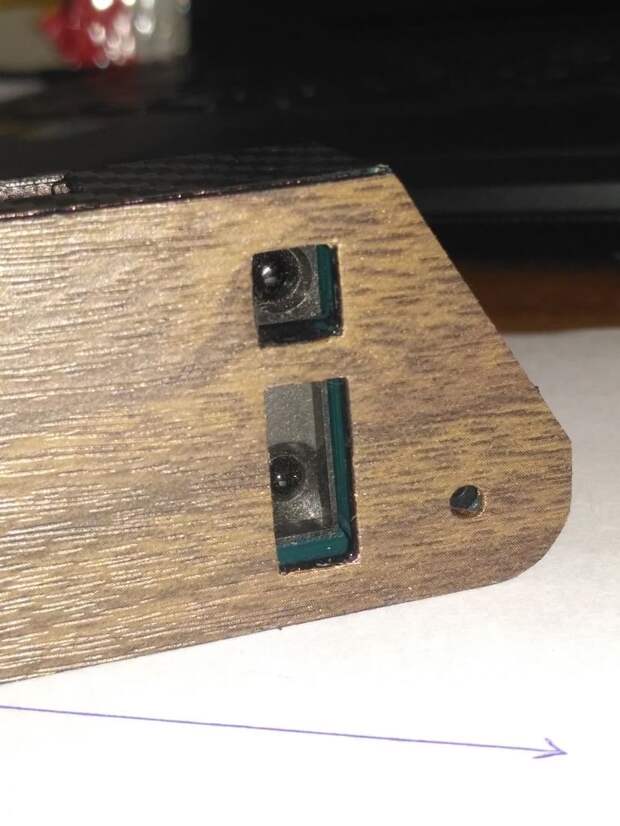
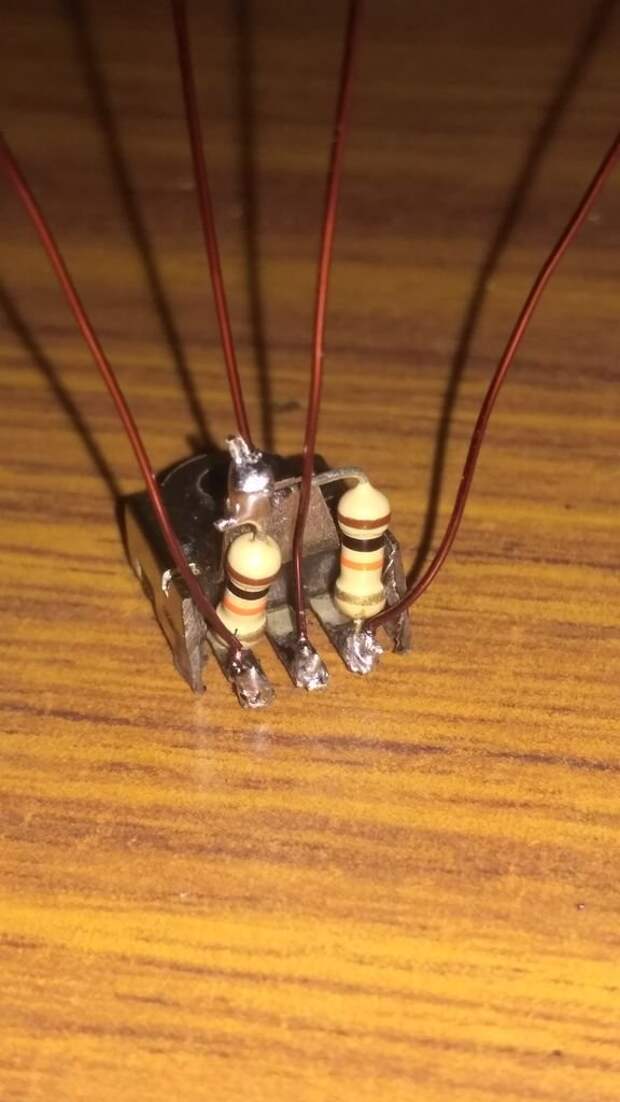
Шаг четвертый: подгонка датчиков
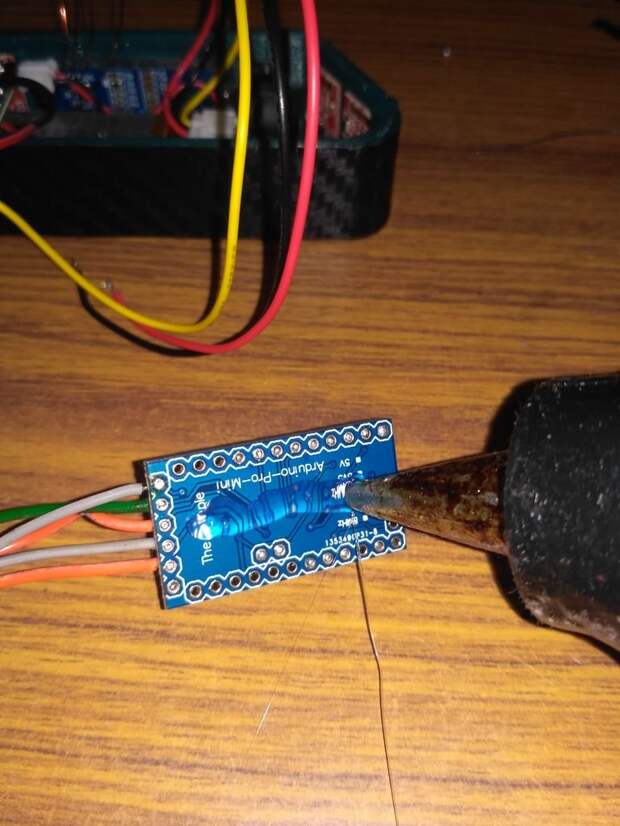
Для уменьшения размеров обрезает крепления ИК-датчик и энкодера.






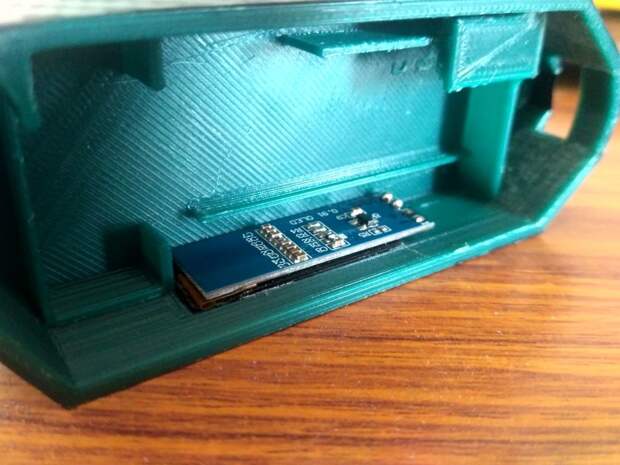
Шаг пятый: дисплей
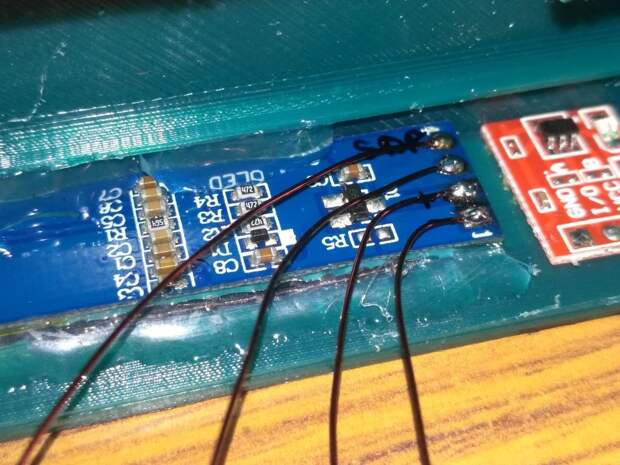
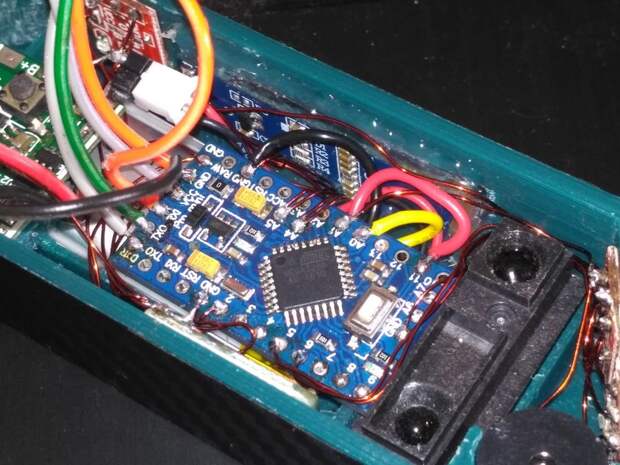
Отмечает названия контактов на задней стороне OLED-дисплея, чтобы впоследствии можно было правильно выполнить подключения. Устанавливает OLED-дисплей в правильное положение, как показано на втором рисунке. Фиксирует дисплей термоклеем.



Шаг шестой: модули
Приклеивает сенсорный модуль и MPU6050.

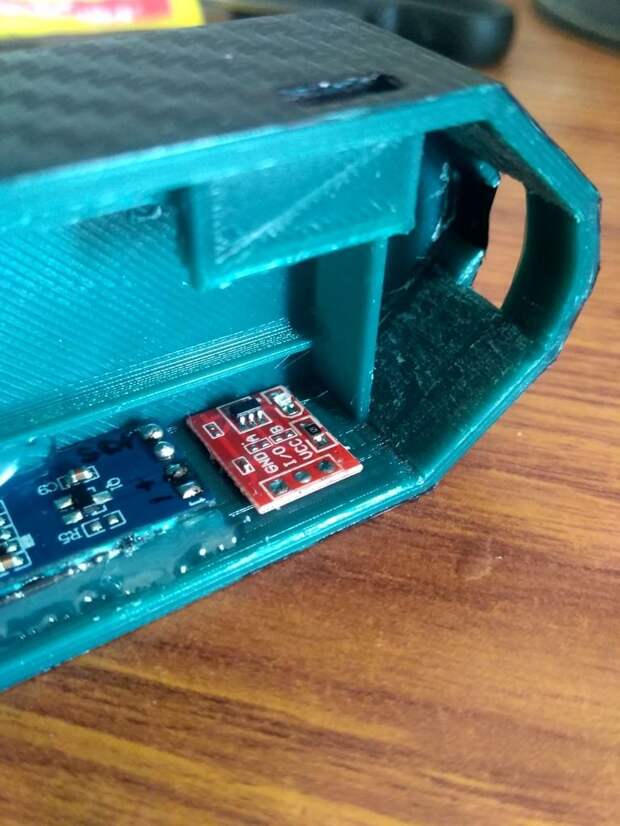



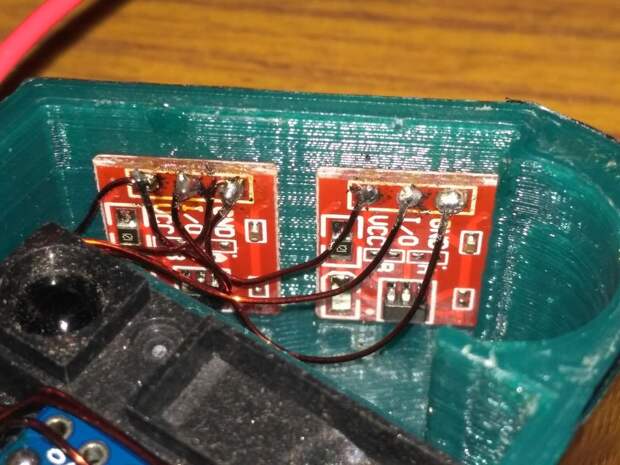
Шаг седьмой: модуль зарядки и АКБ
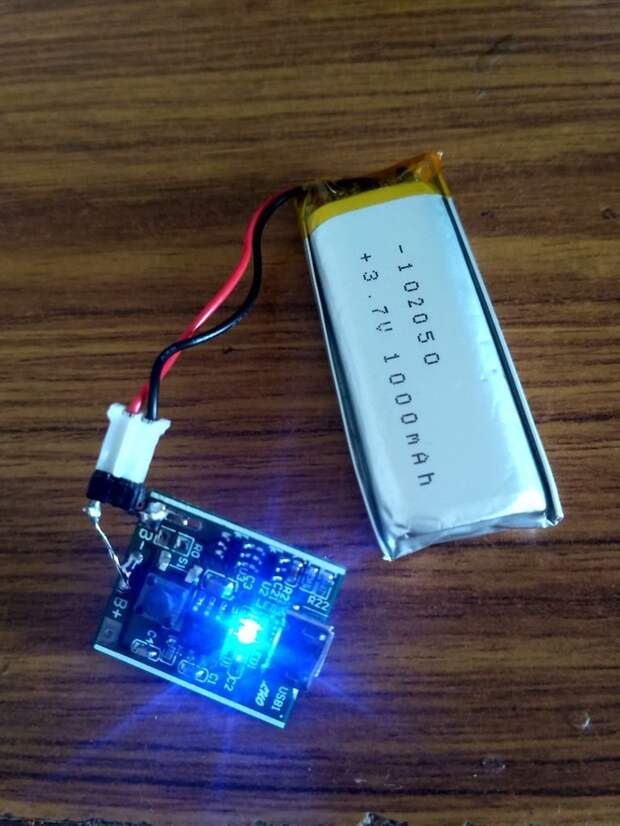
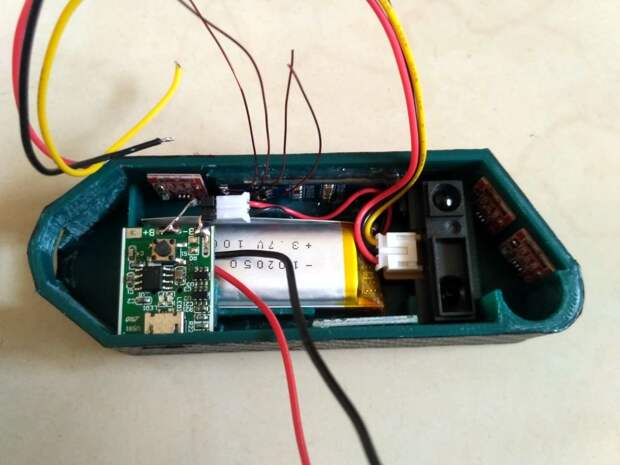
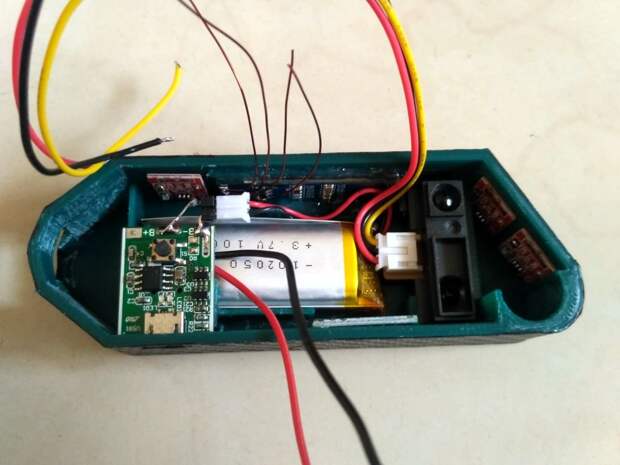
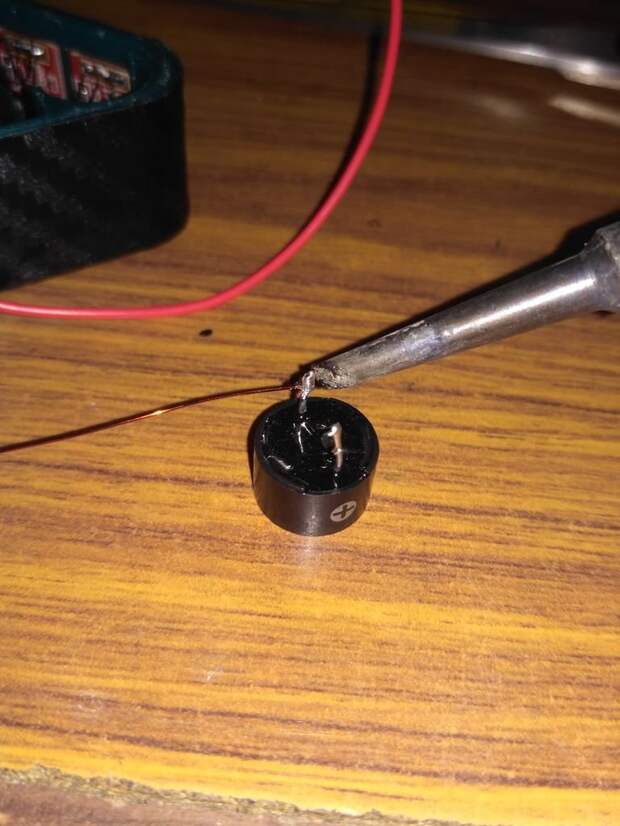
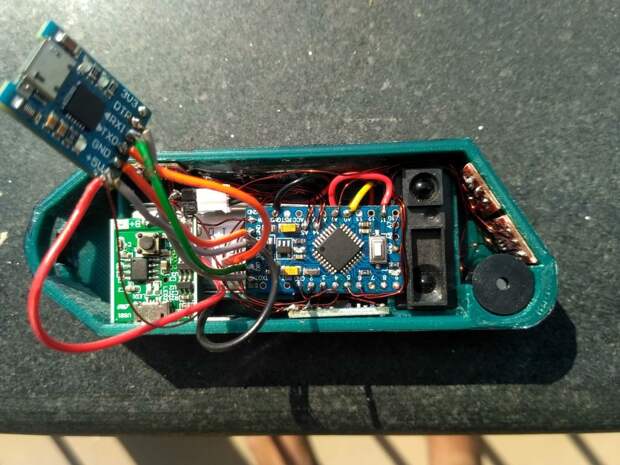
Этот модуль имеет, как схему защиты аккумулятора, так и повышающий преобразователь 5 В, 1 А. Он также имеет кнопку включения / выключения, которую можно использовать в качестве выключателя питания. Гнездовой порт USB на модуле был удален с помощью паяльника, и два провода были припаяны к клеммам + 5 В и заземлению, как показано на 4-м фото.
Дальше нужно припаять 2 штекерных разъема к B + и B-, как показано на первых двух фото, а затем проверьте, работает ли модуль с батареей.
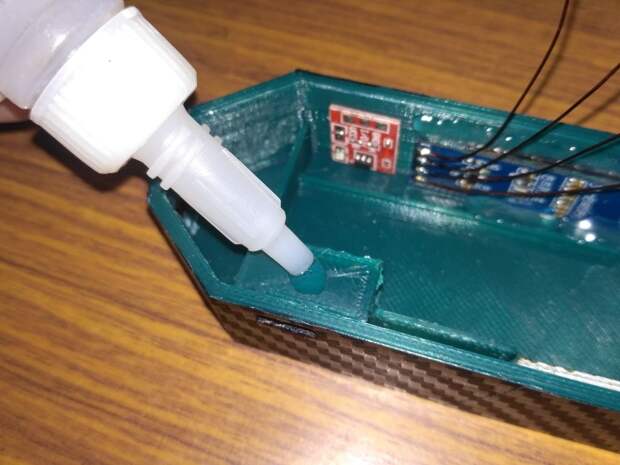
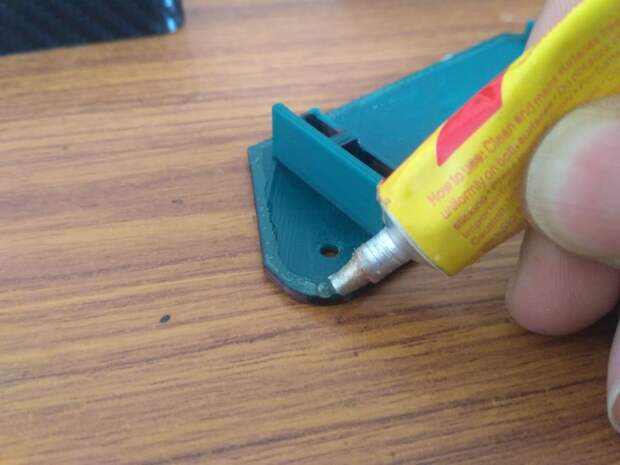
Теперь нужно нанести клей на платформу, предусмотренную для модуля, и аккуратно разместите модуль, убедившись, что порт зарядки и отверстие установлены ровно в отверстия.



Шаг восьмой: установка АКБ и ИК - датчика
Припаивает провода к контактам дисплея. Устанавливает аккумулятор и ИК-датчик.



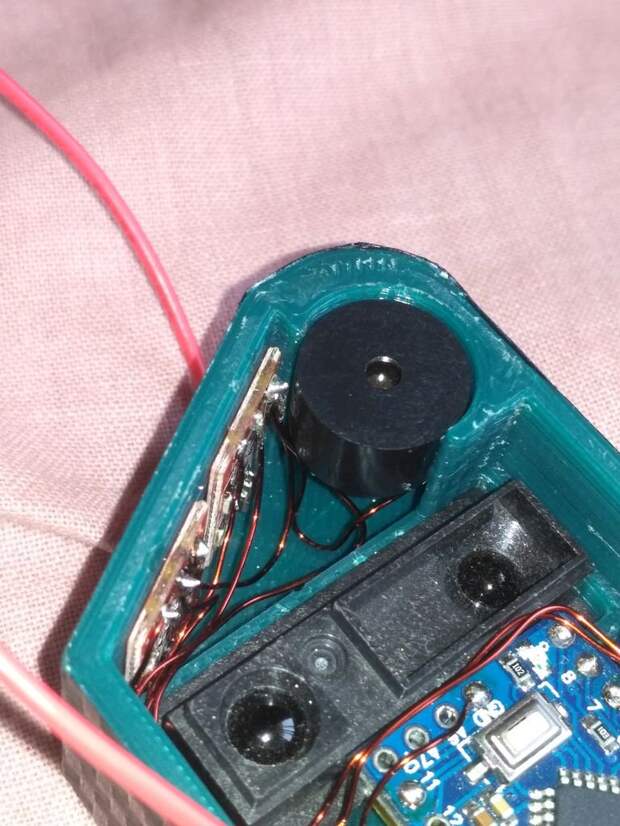
Шаг девятый: зуммер и модуль зарядки
Согласно схемы монтирует модуль зарядки и зуммер.



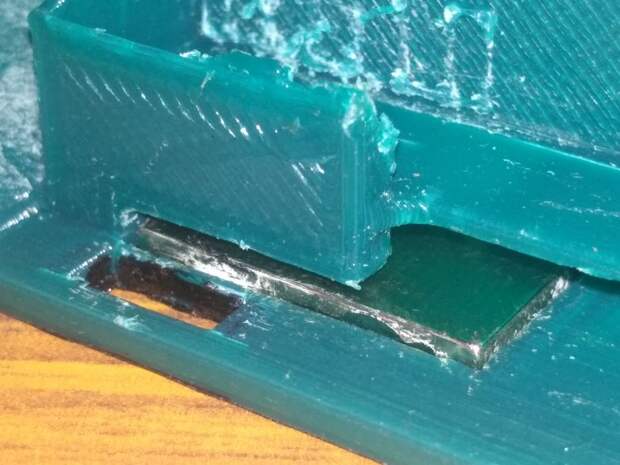
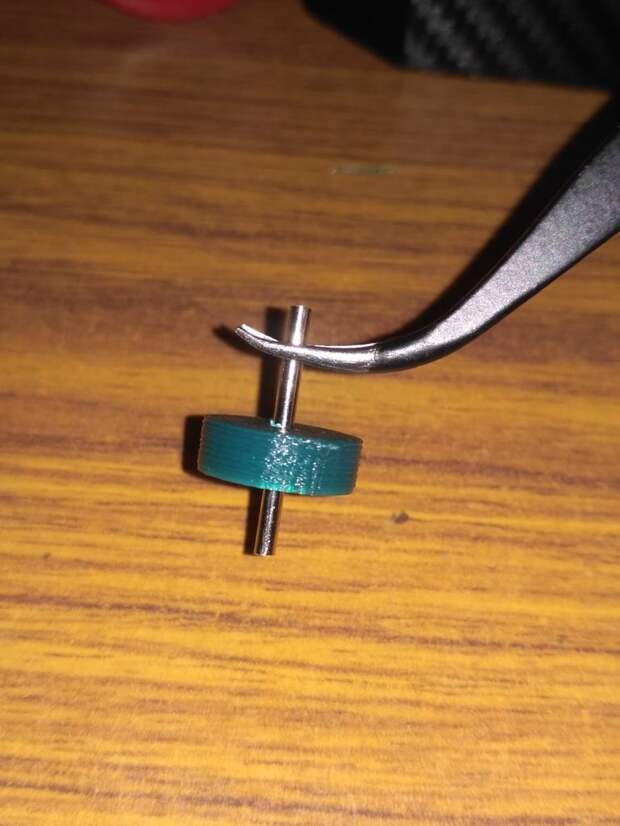
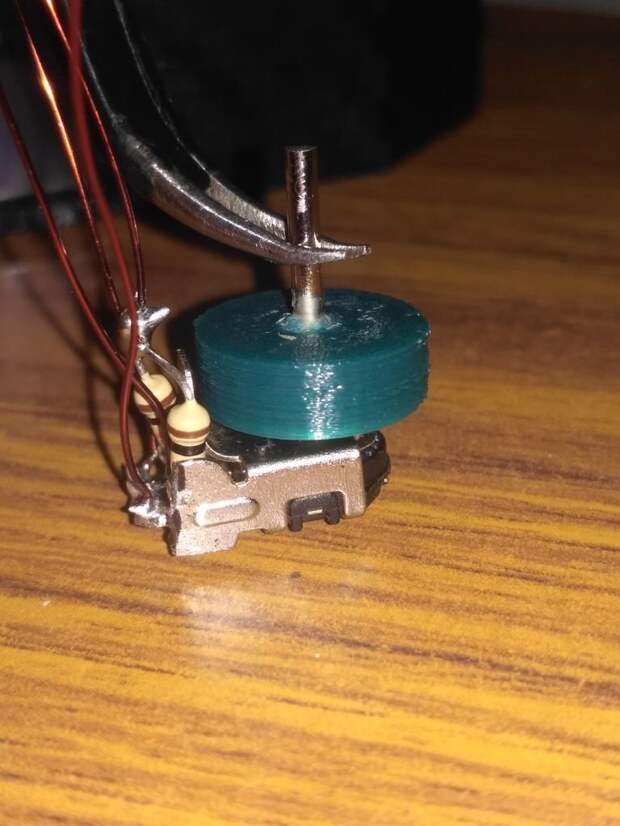
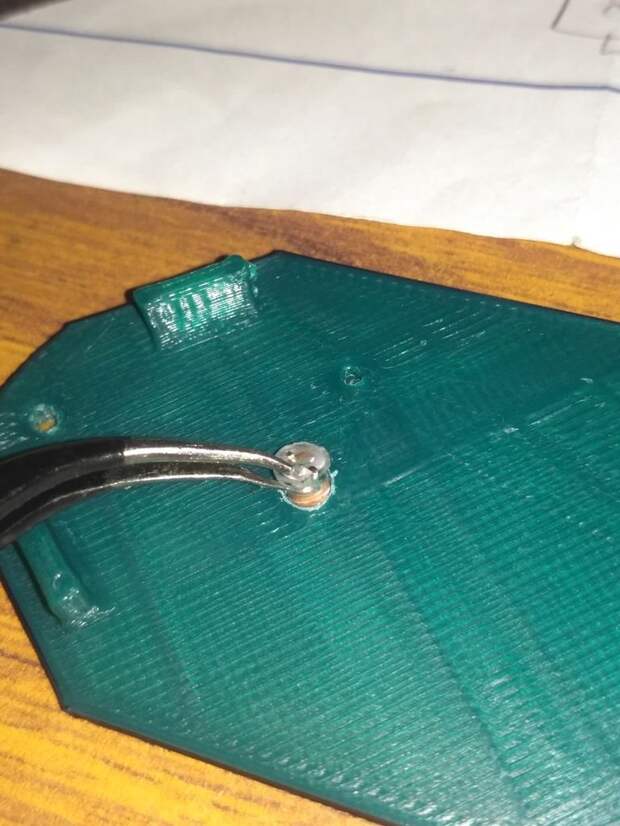
Шаг десятый: энкодер
Согласно схемы монтирует энкодер. Вставляет стальную ось в энкодер и колесо. Для фиксации оси и колеса использует супер-клей. Устанавливает энкодер с колесом внутри корпуса.








Шаг одиннадцатый: монтаж
Закрепляет сенсорные модули. Согласно схемы монтирует провода. При монтаже нужно следить, чтобы провода не попали под колесо и не закрывали обзор ИК-датчика.




Шаг двенадцатый: загрузка кода
Загружает код и библиотеки.
final_code.ino
Adafruit_SSD1306-master.zip
Adafruit-GFX-Library-master.zip
SharpIR-master.zip

Шаг тринадцатый: калибровка
Сначала калибруется гироскоп. Поскольку модуль акселерометра / гироскопа MPU6050 просто приклеен к корпусу, он может быть не совсем ровным. Поэтому для исправления этой ошибки выполняются следующие шаги.
1. Подключите устройство к компьютеру и поместите его на ровную поверхность.
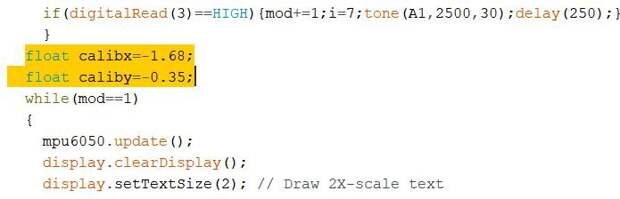
2. Перейдите в режим «УРОВЕНЬ» на устройстве, коснувшись кнопки «M» и запишите значения X и Y.
3: Присвойте эти значения переменным « calibx » и « caliby » в коде.
4: Загрузите программу снова.



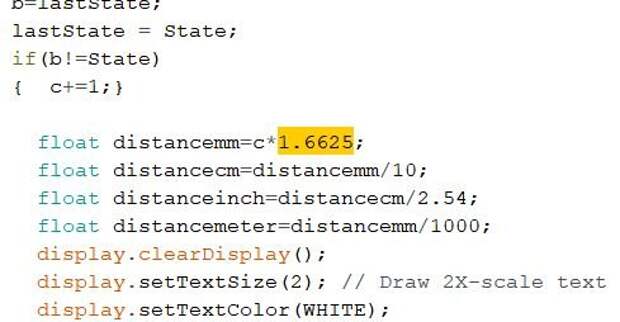
Теперь высчитывает расстояния за один оборот колеса.
Количество шагов на оборот вала энкодера, N = 24 шага
Диаметр колеса, D = 12,7 мм
Окружность колеса, С = 2 * пи * (Д / 2) = 2 * 3,14 * 6,35 = 39,898 мм
Следовательно, расстояние, пройденное за шаг = C / N = 39,898 / 24 = 1,6625 мм.
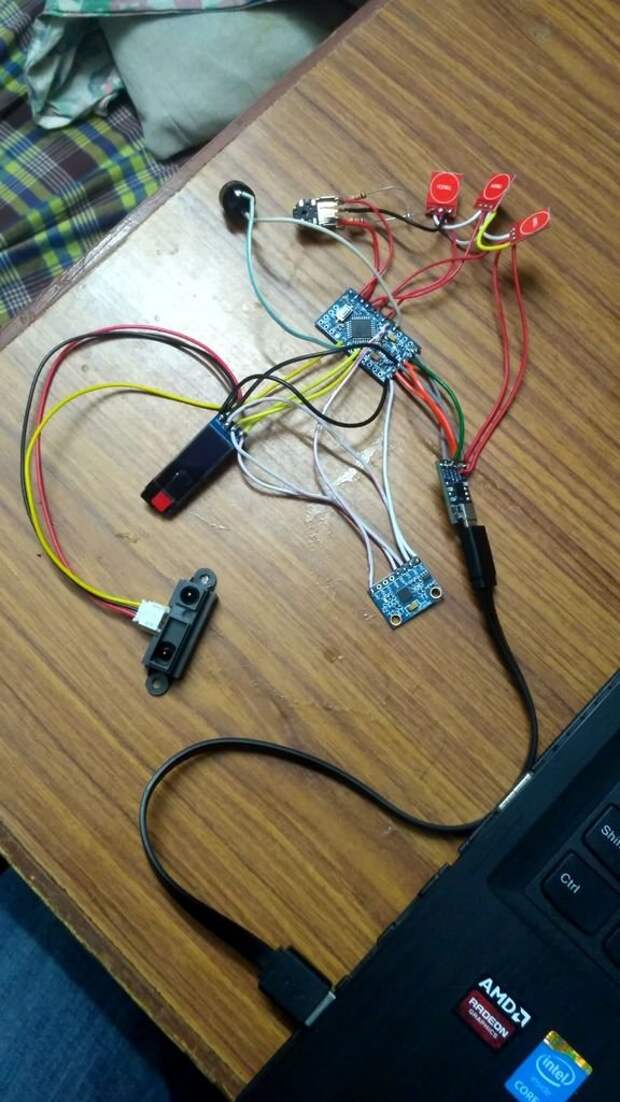
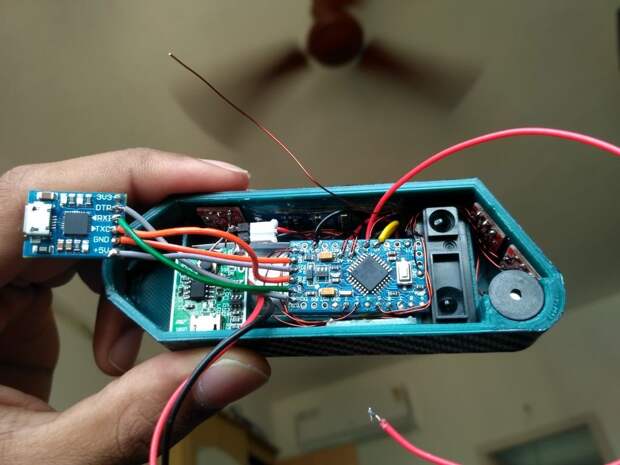
Шаг четырнадцатый: тестирование
Перед установки крышки корпуса, производит тестирование датчиков, модуля заряда, кнопок, дисплея.



Шаг пятнадцатый: кнопка и сборка корпуса
Кнопка включения на плате зарядки короткая и мастер, обрезав ножки, устанавливает дополнительно светодиод, который будет нажимать на кнопку.



Склеивает две половинки корпуса.





Шаг шестнадцатый: маркировка кнопок
Буквы были вырезаны на лазерном резаке, а затем наклеены на корпус.




Все готово, осталось только протестировать устройство в работе.







Свежие комментарии